Pony.ai在多传感器感知上积累了很多的经验,尤其是今年年初在卡车上开始了新的尝试。我们有不同的传感器配置,以及不同的场景,对多传感器融合的一些新的挑战,有了更深刻的认识,今天把这些经验,总结一下,分享给大家,与大家一起讨论。
本次分享分为三部分:
- 为什么需要多传感器融合?
- 传感器融合的一些先决条件
- 如何做传感器融合?
为什么需要多传感器融合?
首先,单一传感器在自动驾驶中,都有各自的挑战,所以先了解下常用的传感器的挑战是什么:
1. Camera data
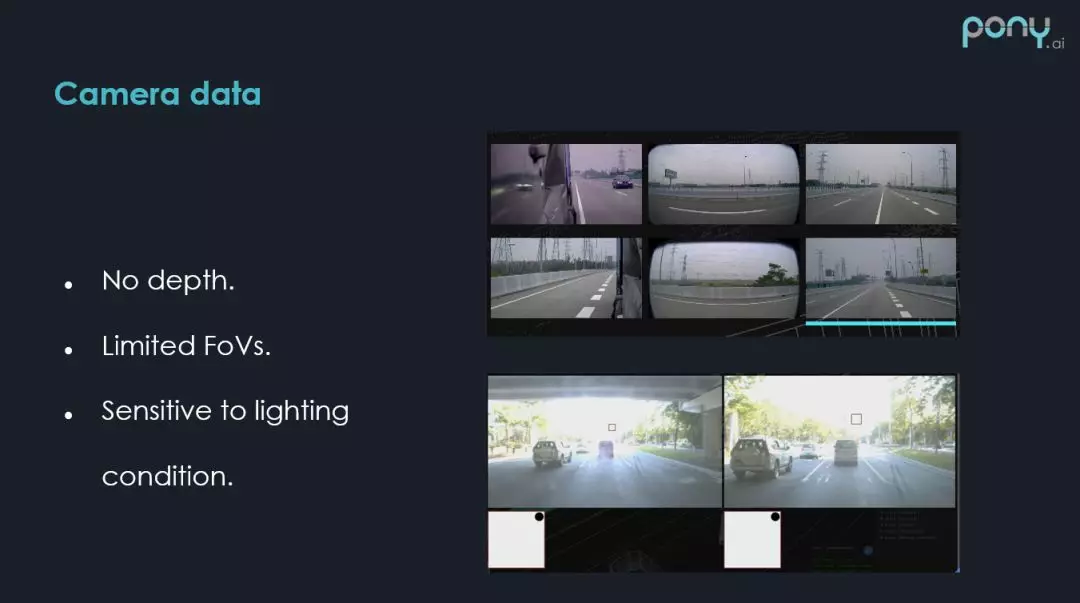
照相机数据遇到的挑战:
① 没有深度信息。
② 视场角有限,以卡车的传感器配置来说,需要比较多的摄像头,这里用到了6个摄像头覆盖了270°的视场角。